
"At CERLAB, we focus a lot on solving industrial problems. And having a partner like Vention who provides us with the tools required to do that is a great one for us."

Helping manufacturers automate their operations in record time with the only hardware and software AI-powered platform built for the factory floor.

























Vention Machines in the Field
Factories Using Vention
Industries Served
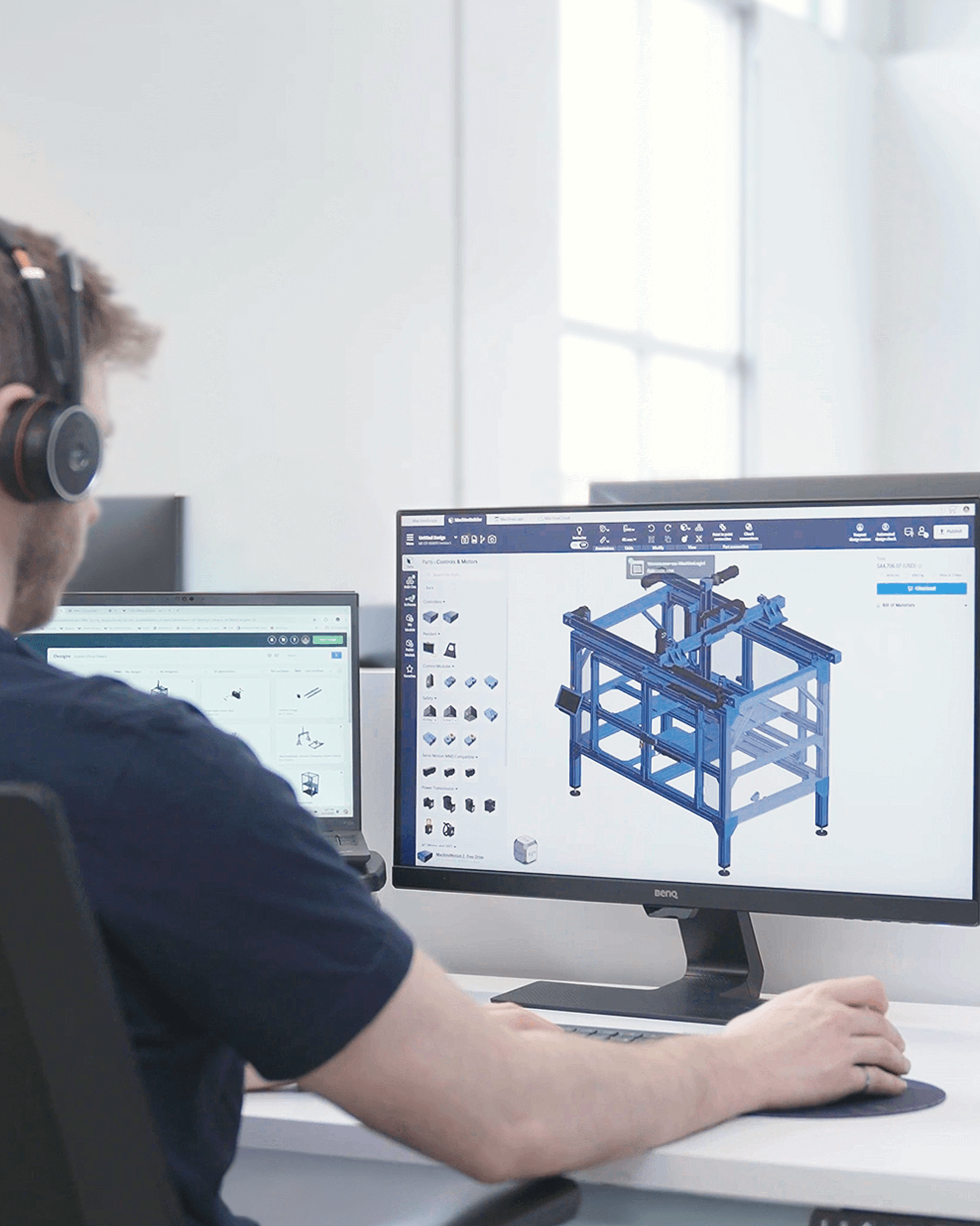
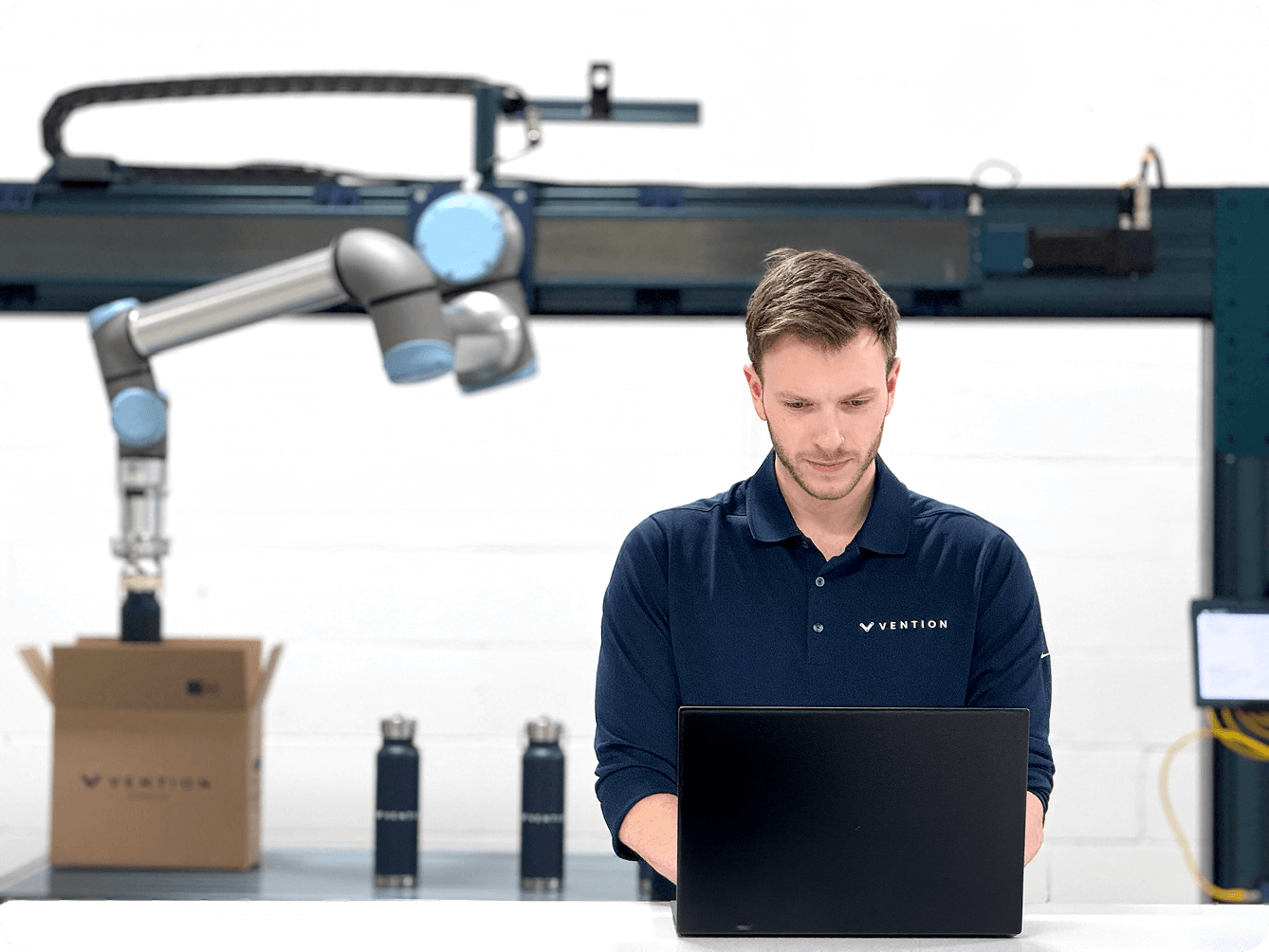
Go from Design to Operation at breakneck speed with the most comprehensive AI-powered software platform for manufacturing automation.
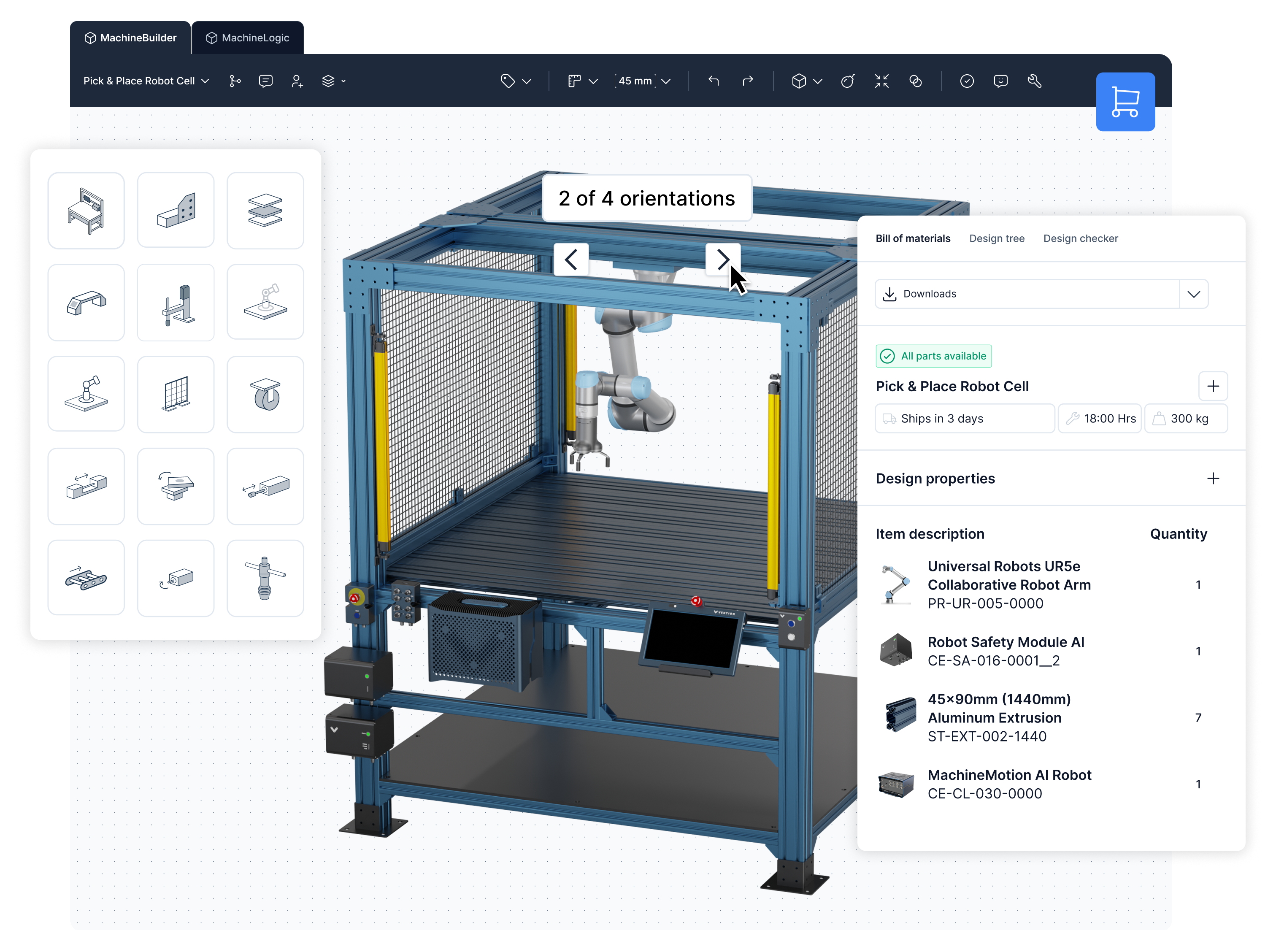
Design equipment in minutes with the only CAD software built exclusively for the factory floor. Order online for next day delivery.
AI-assisted design with modular parts
Auto-generated bill of materials and online ordering
Cloud-native collaboration
Design equipment in minutes with the only CAD software built exclusively for the factory floor. Order online for next day delivery.
AI-assisted design with modular parts
Auto-generated bill of materials and online ordering
Cloud-native collaboration
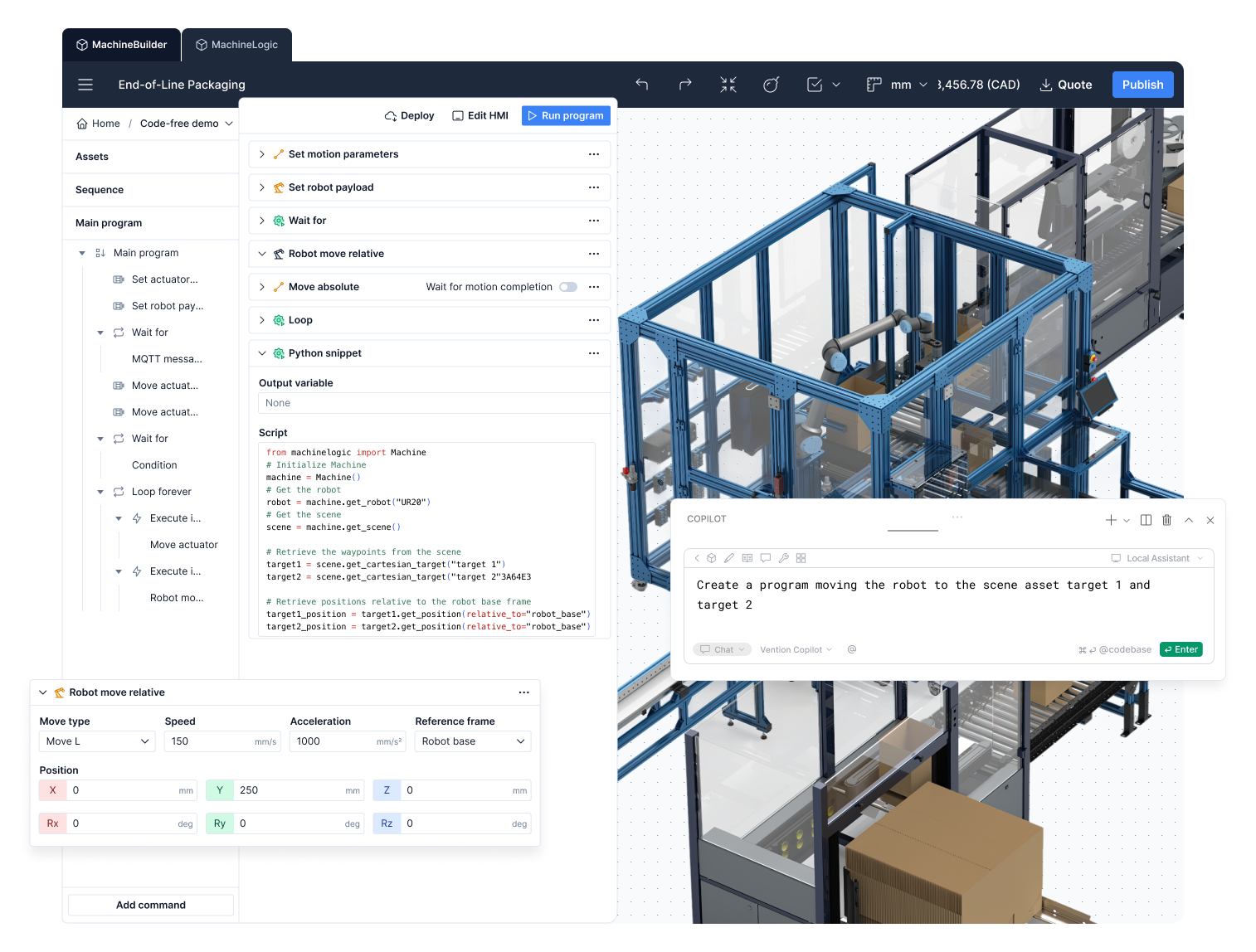
Discover the most intuitive programming, and simulation environment, for everything from robot arms to conveyors.
No-code, AI Copilot, and Python programming options
Accurate digital twin with physics engine
Software-defined machine configuration
Discover the most intuitive programming, and simulation environment, for everything from robot arms to conveyors.
No-code, AI Copilot, and Python programming options
Accurate digital twin with physics engine
Software-defined machine configuration
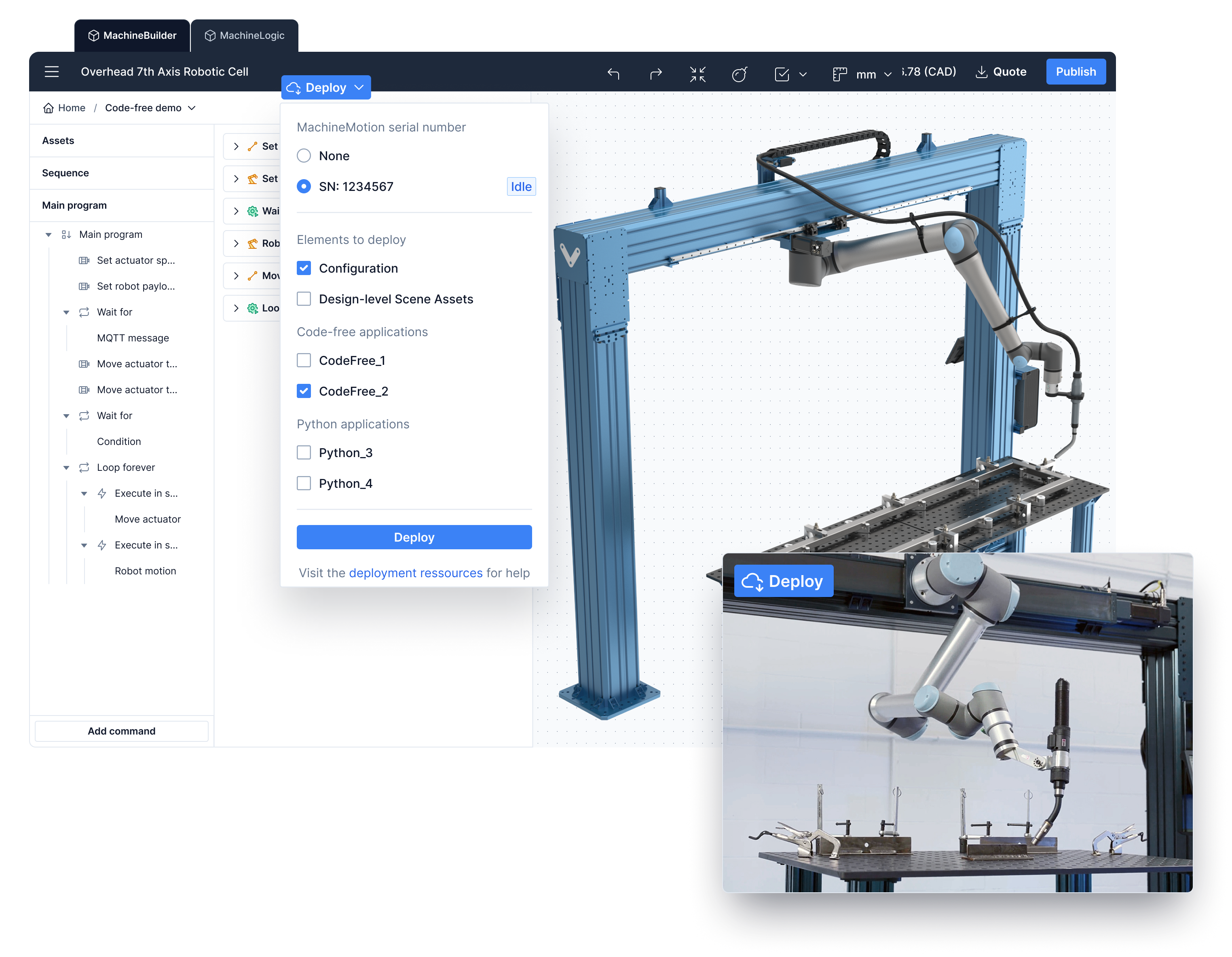
Go from digital twin to physical twin in minutes with cloud-to-factory floor deployment and over-the-air updates.
Order your machine online in a few clicks
Ships pre-assembled or with assembly instructions
Deploy programs to your machine in one click
Go from digital twin to physical twin in minutes with cloud-to-factory floor deployment and over-the-air updates.
Order your machine online in a few clicks
Ships pre-assembled or with assembly instructions
Deploy programs to your machine in one click
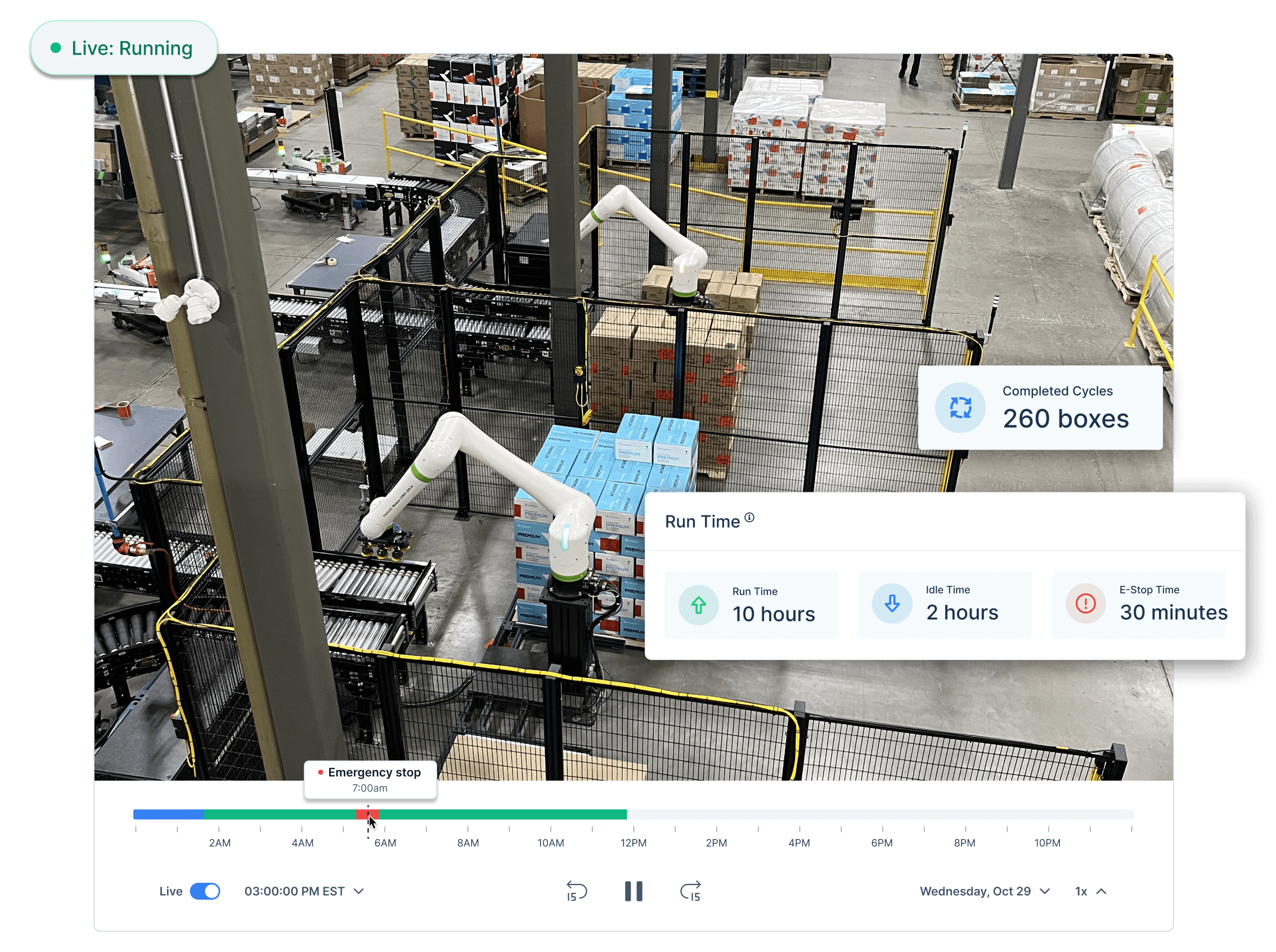
Stay connected and never miss a pulse from your factory floor.
Monitor your equipment remotely with live camera feed
Optimize your operations with performance analytics
Get notified with configurable alerts and events
Stay connected and never miss a pulse from your factory floor.
Monitor your equipment remotely with live camera feed
Optimize your operations with performance analytics
Get notified with configurable alerts and events
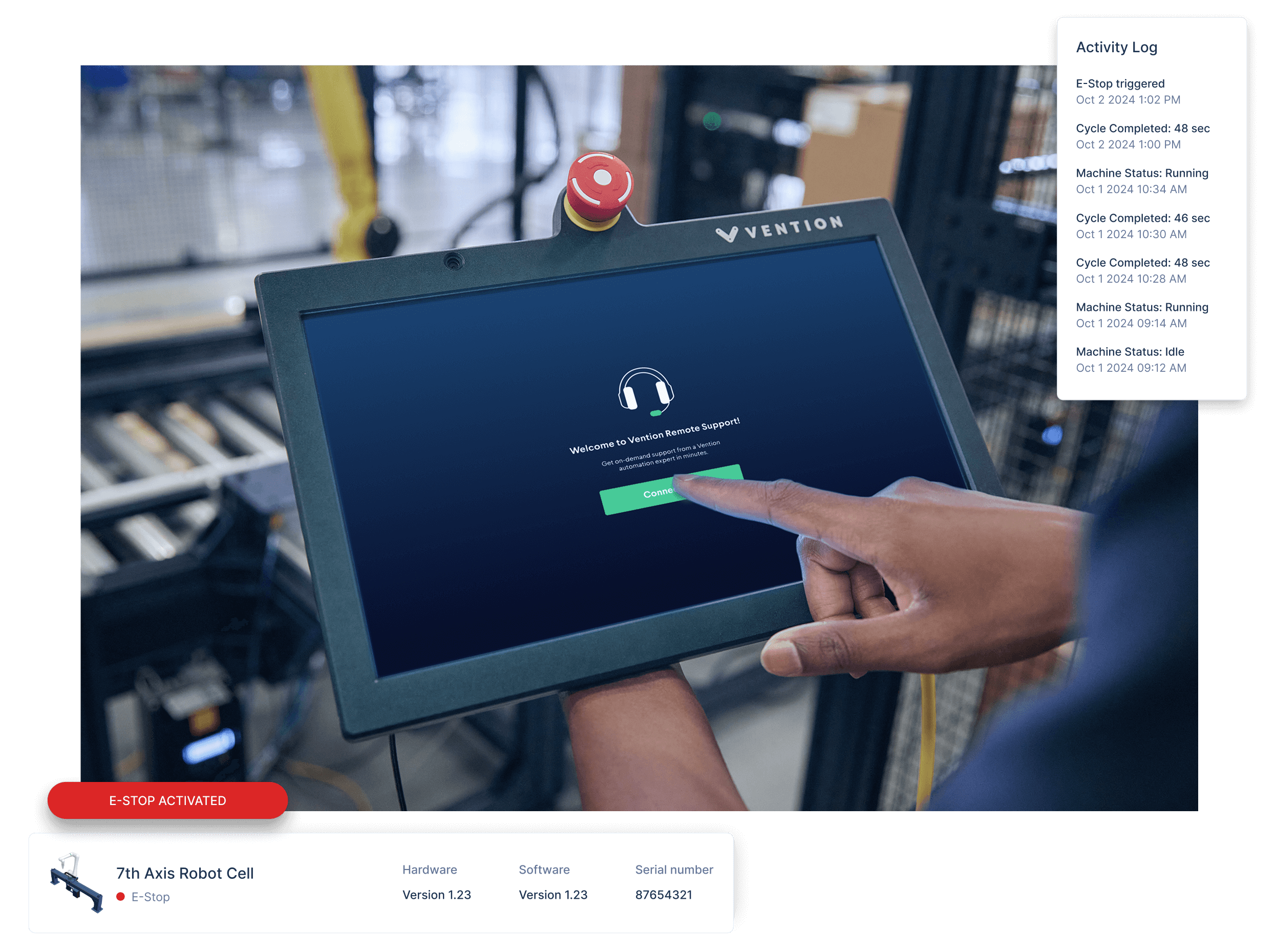
Get on-demand remote support from Vention experts anytime, from anywhere.
Instant remote support directly from the operator HMI
Dual camera feeds and screen sharing for quick diagnostic
Remote access to machine performance, health and logs
Get on-demand remote support from Vention experts anytime, from anywhere.
Instant remote support directly from the operator HMI
Dual camera feeds and screen sharing for quick diagnostic
Remote access to machine performance, health and logs
Eliminate integration hassles with the largest library of modular automation components. Certified for plug-and-play compatibility.
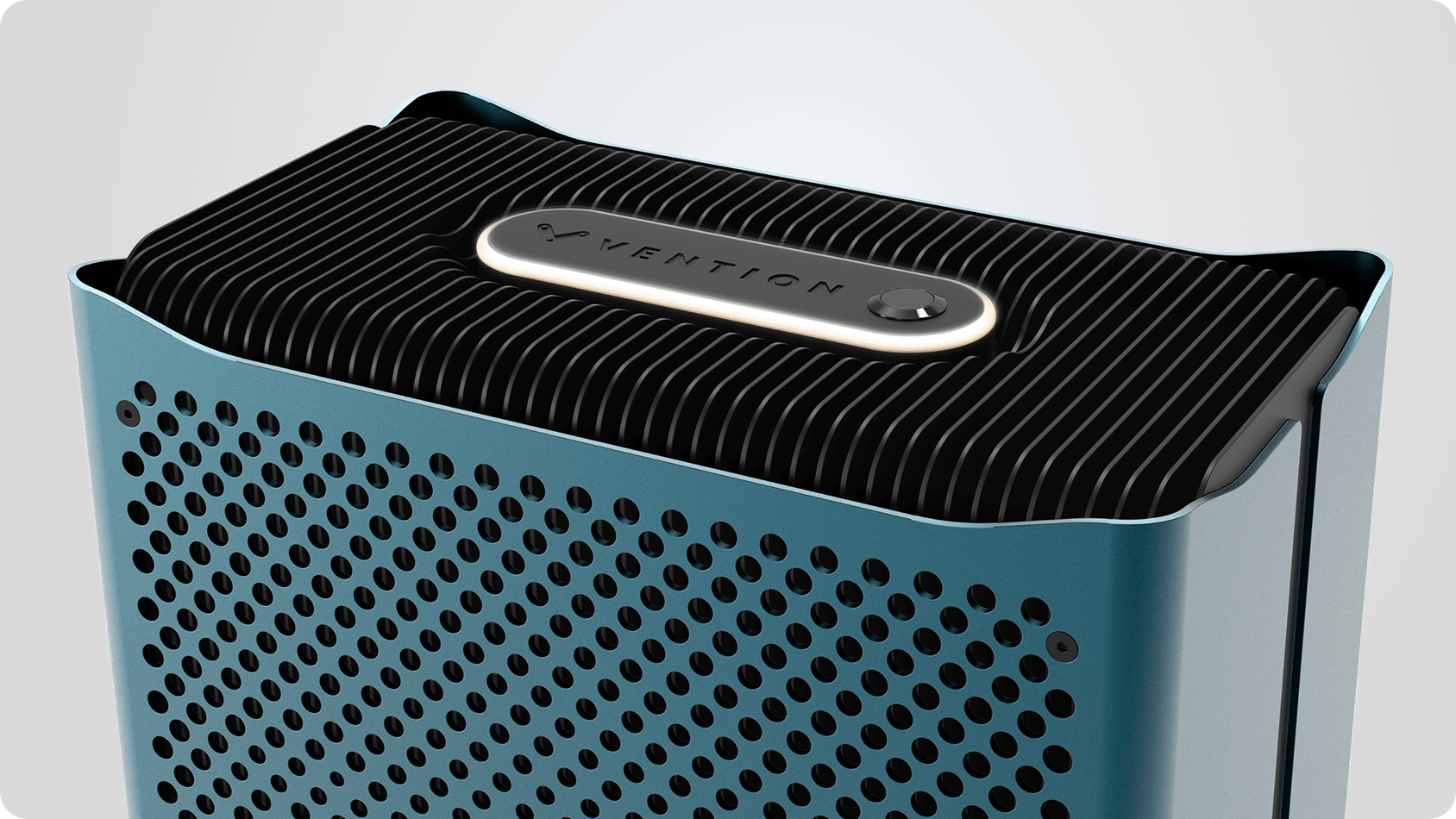
Power and control robots, motors, sensors, AI-driven robotic applications and more, with one plug-and-play automation controller.
Up to 30 daisy-chain motors powered over EtherCAT
Built-in NVIDIA Jetson GPU for AI-powered robotics
Wi-Fi, LAN or LTE connectivity
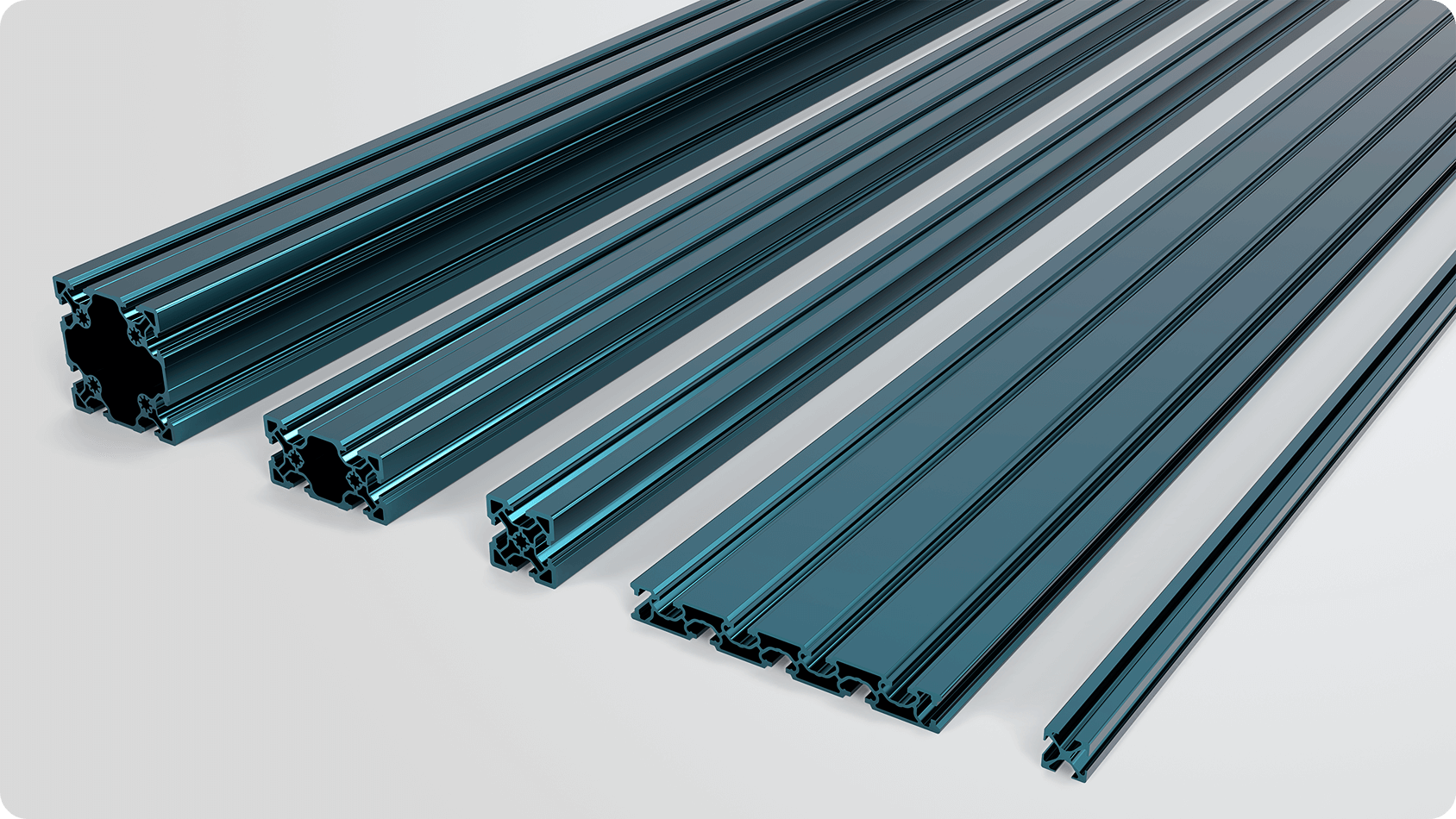
Design ultra-rigid modular workstations, machine frames, and robot cells with patented T-slot aluminum extrusions.
Patented V-groove supports 25% more payload
Fastening system provides 5x vibration resistance
Best-in-class rigidity and strength-to-weight ratio
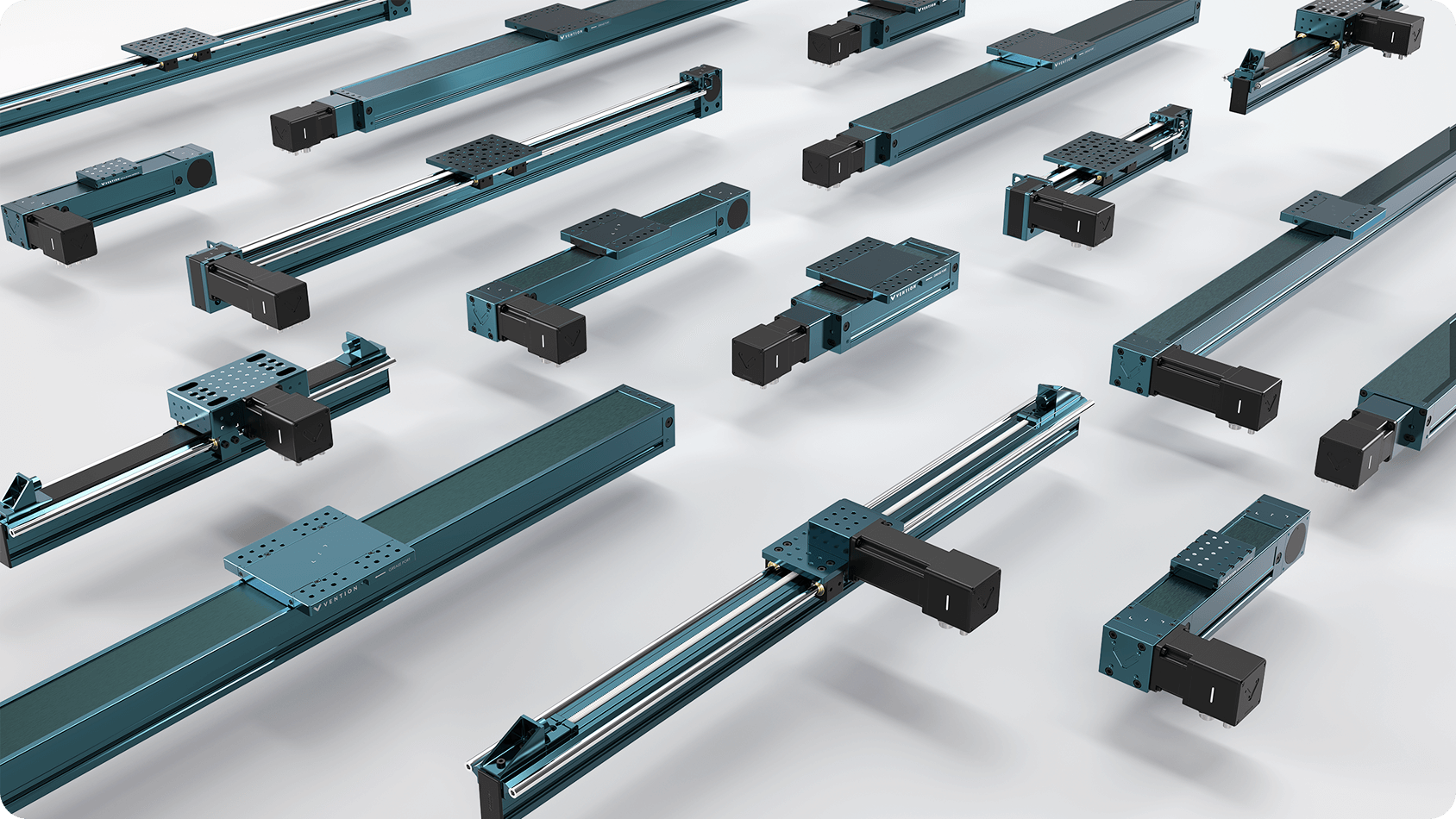
Easily create automated equipment with modular actuators, from robot range extenders to gantry systems.
Seven linear and rotary actuator types available in 10+ lengths
Plug-and-play servomotors, sensors, gearboxes and brakes
Easily create 2 to 4 axis gantry systems
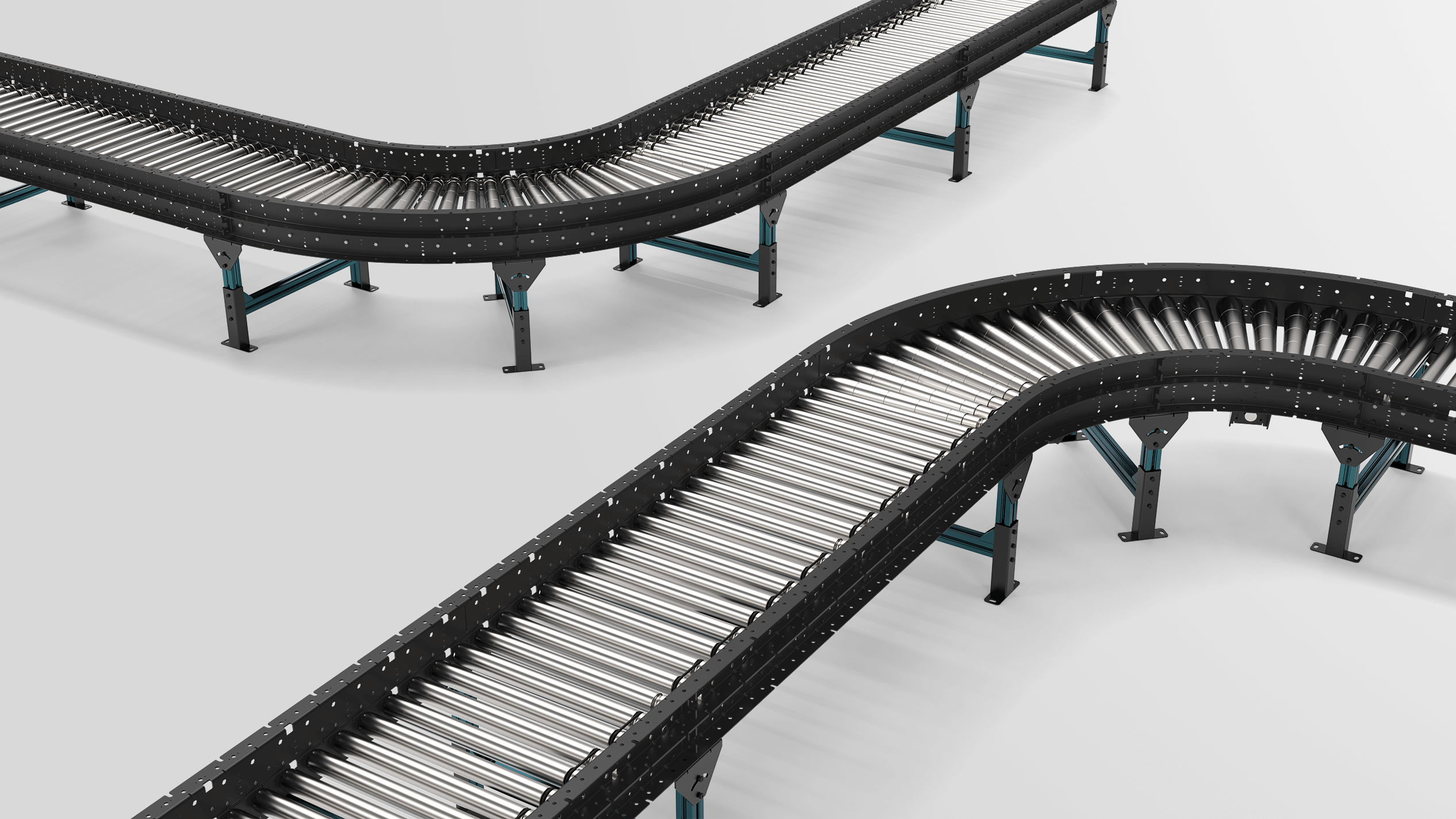
Create material handling workflows with modular conveyor sections and an intuitive no-code App.
Roller, timing-belt and belt conveyors available in multiple widths and lengths
Quick online configuration with pre-defined modular conveyor sections
Intuitive no-code programming with built-in behavior for sorting and accumulation
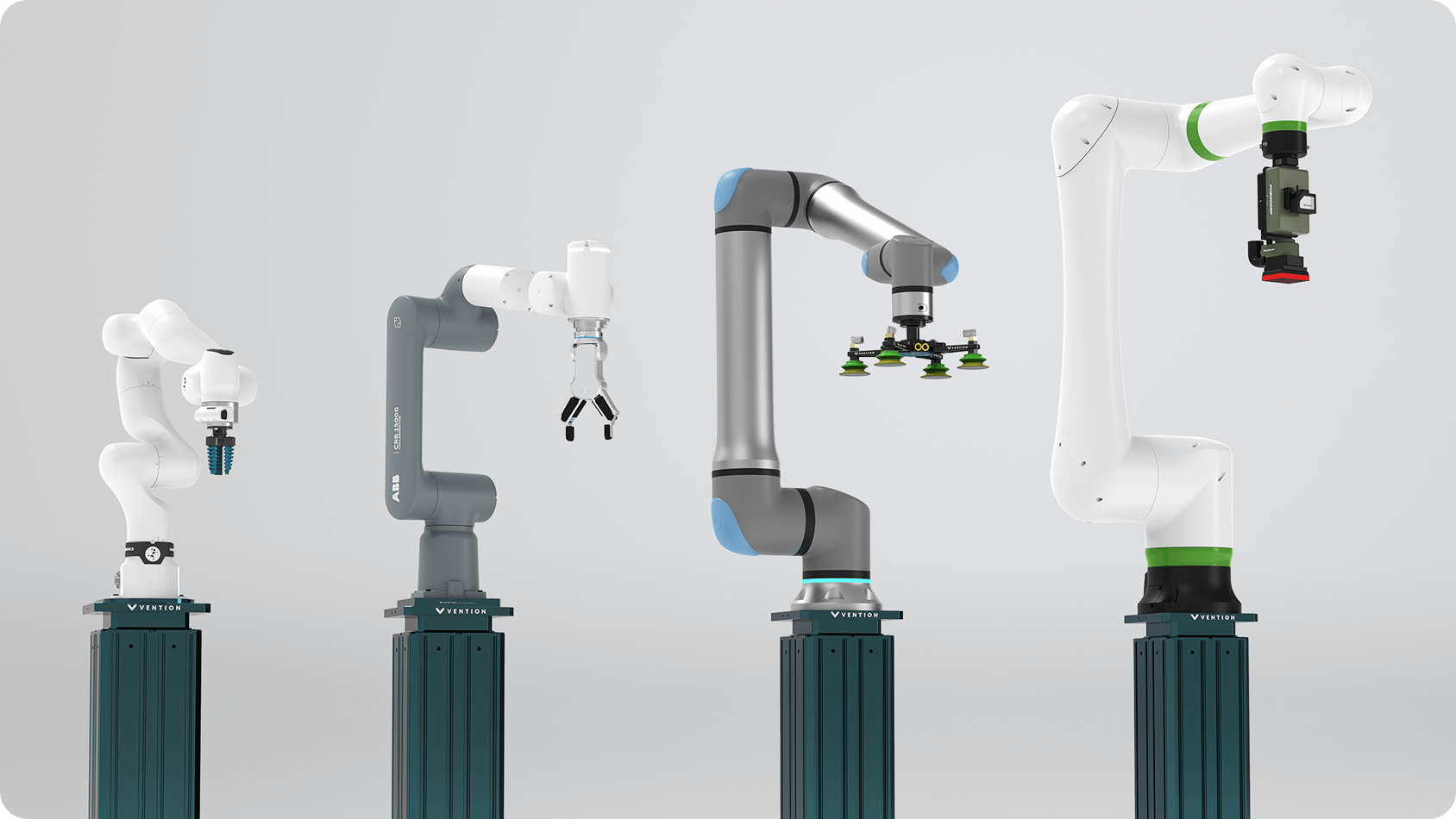
Design robot agnostic cells, compatible with top brands such as ABB, FANUC, and Universal Robots.
Program and simulate your entire robot cell in one cloud platform
Extensive library of accessories from EOAT to cable management
Next-day shipping options available
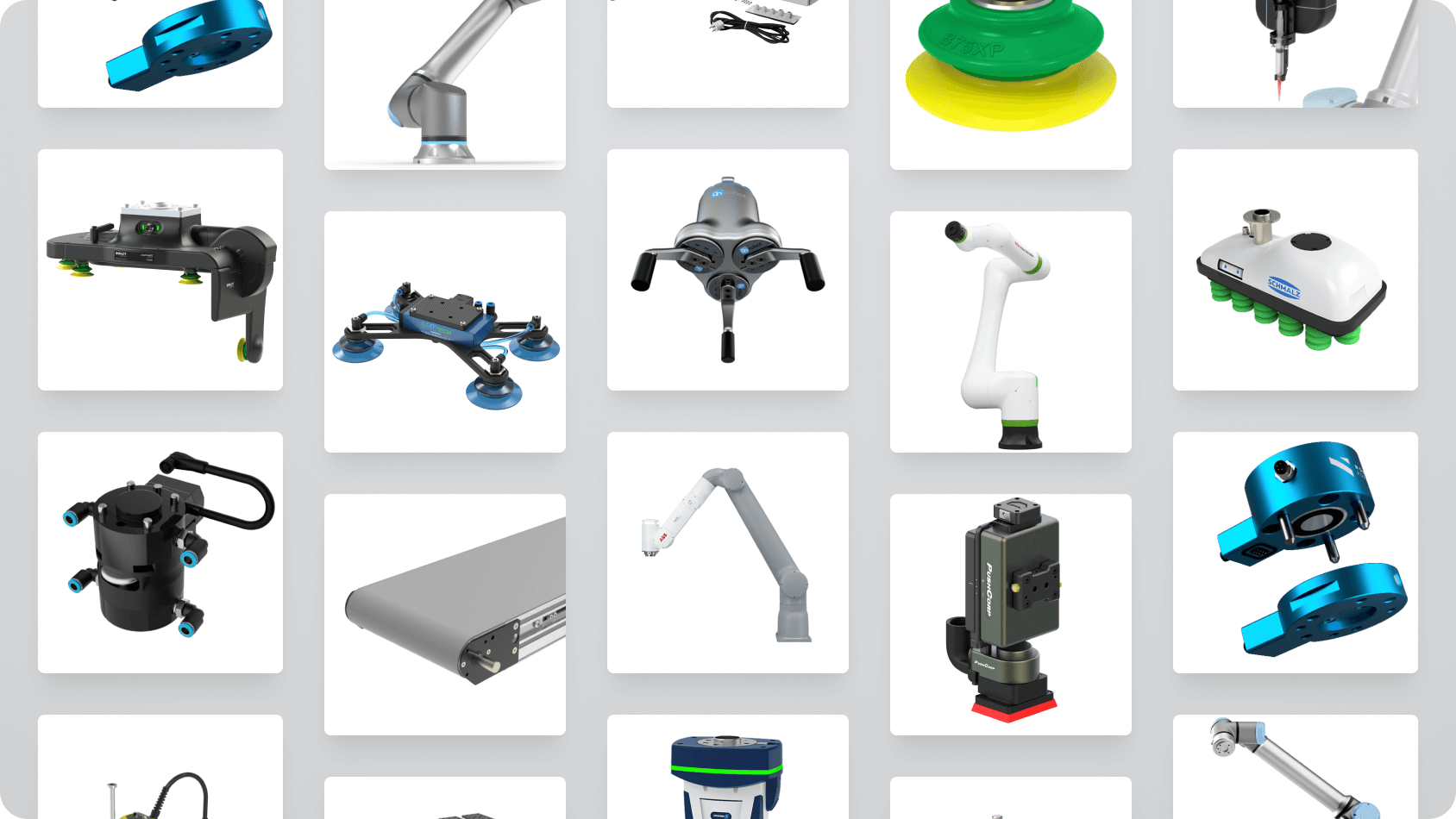
Experience a true one-stop shop with the largest ecosystem of plug-and-play components for industrial automation and robotics.
3,000+ components across 25 categories, including robots, sensors and EOAT
Plug-and-play compatibility across the Vention ecosystem
Transparent pricing and next-day shipping options available
Discover Vention's selection of pre-engineered and ready-to-deploy applications. Built on Vention's full-stack automation platform, these modular applications are customizable and scale with your operations.

The easiest cobot palletizer to customize, relocate and operate—connected with analytics, live video streaming and remote support.
Up to 30kg payload and 13 pick per minutes
Intuitive operator interface, from pallet recipe to recovery
Connected with on-demand support and analytics
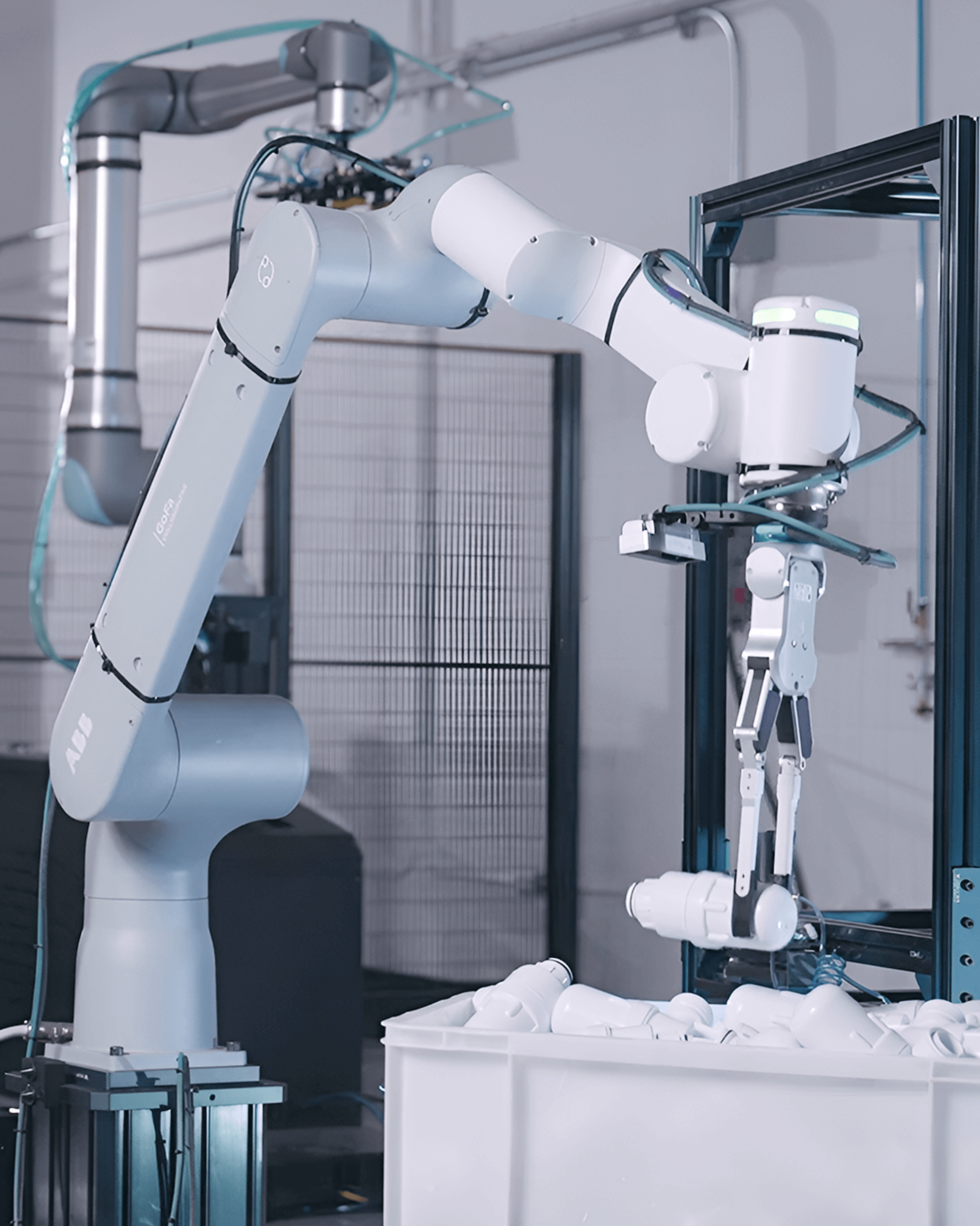
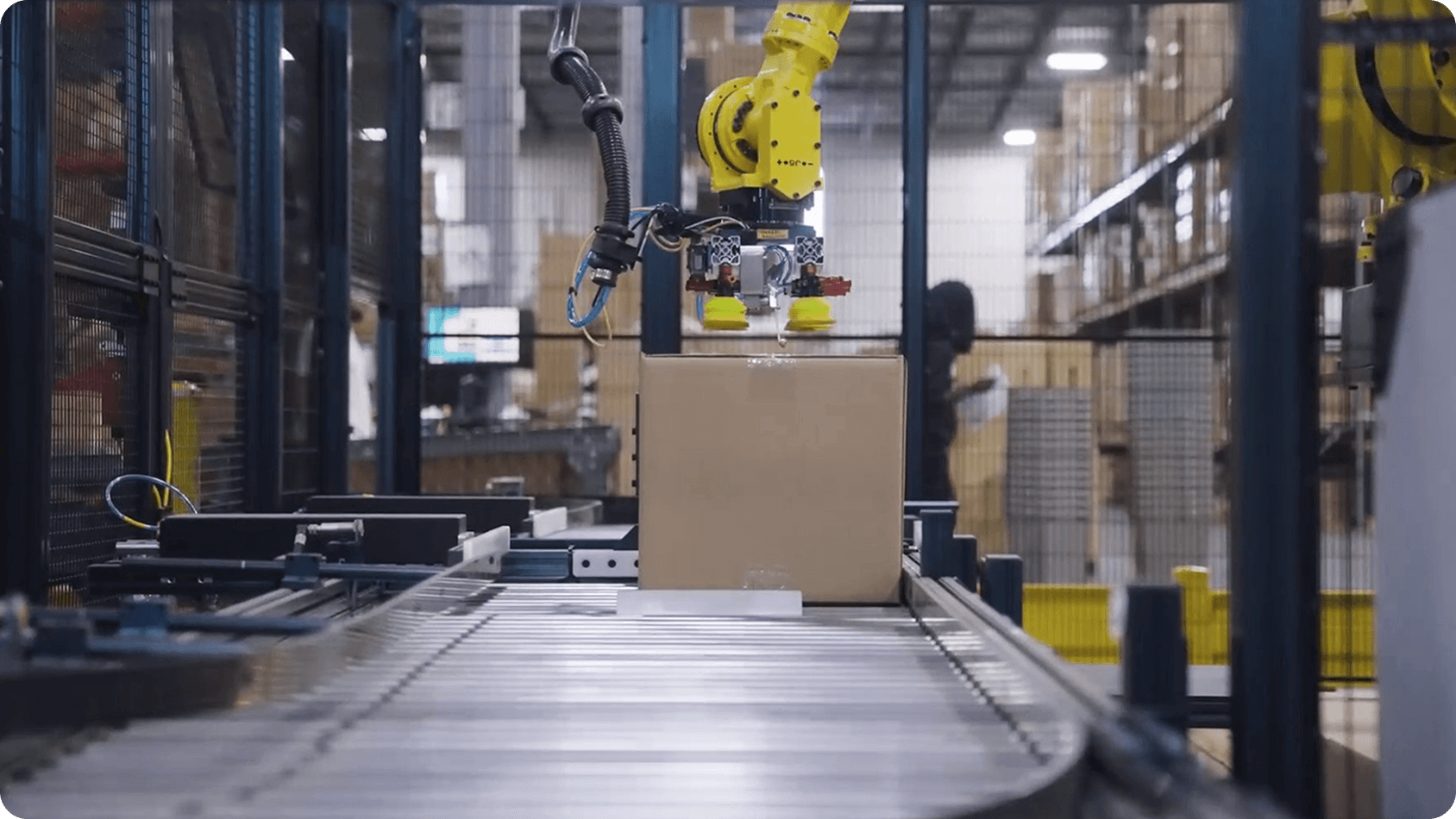
AI-powered automation, driven by NVIDIA technology, to handle repetitive and unstructured tasks, replacing hard-to-fill positions.
From CAD to pick in minutes with pre-trained AI-models
Powered by MachineMotion AI and NVIDIA technology
Effective in various lighting conditions
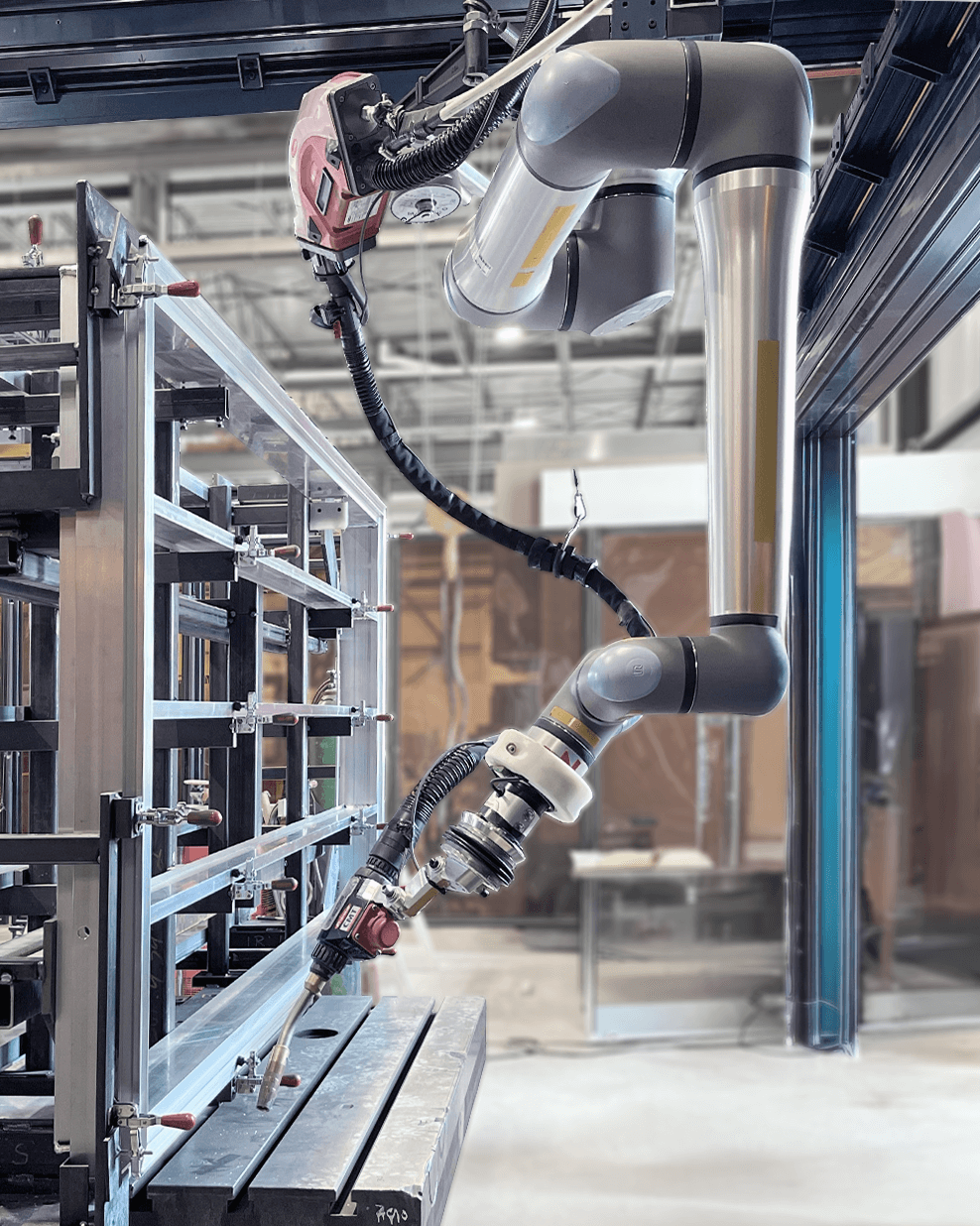
Modular robotic welding solutions enable high-mix manufacturers to adapt rapidly to evolving production needs.
Floor-mounted, overhead and range extender configurations
Compatible with ABB, FANUC and Universal Robotics
Table top, fixtures, and protection panels options
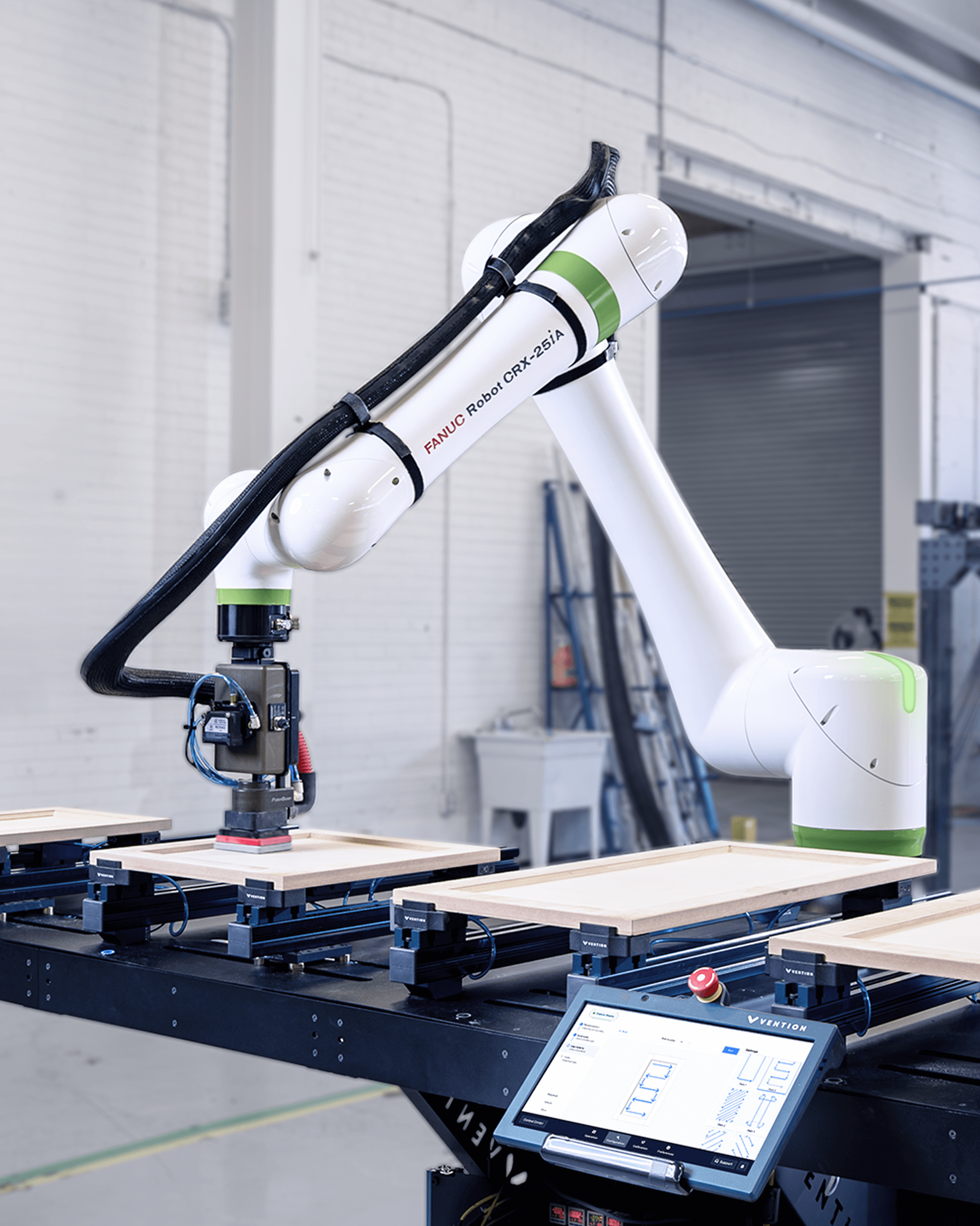
Turnkey robotic sanding for woodworkers and cabinetmakers that delivers consistent finishes, safer work, and faster lead times.
4 or 8 panel configuration, single or dual sanding tools
Intuitive, autonomous panel detection and sanding
Optimized for 3M Abrasives™
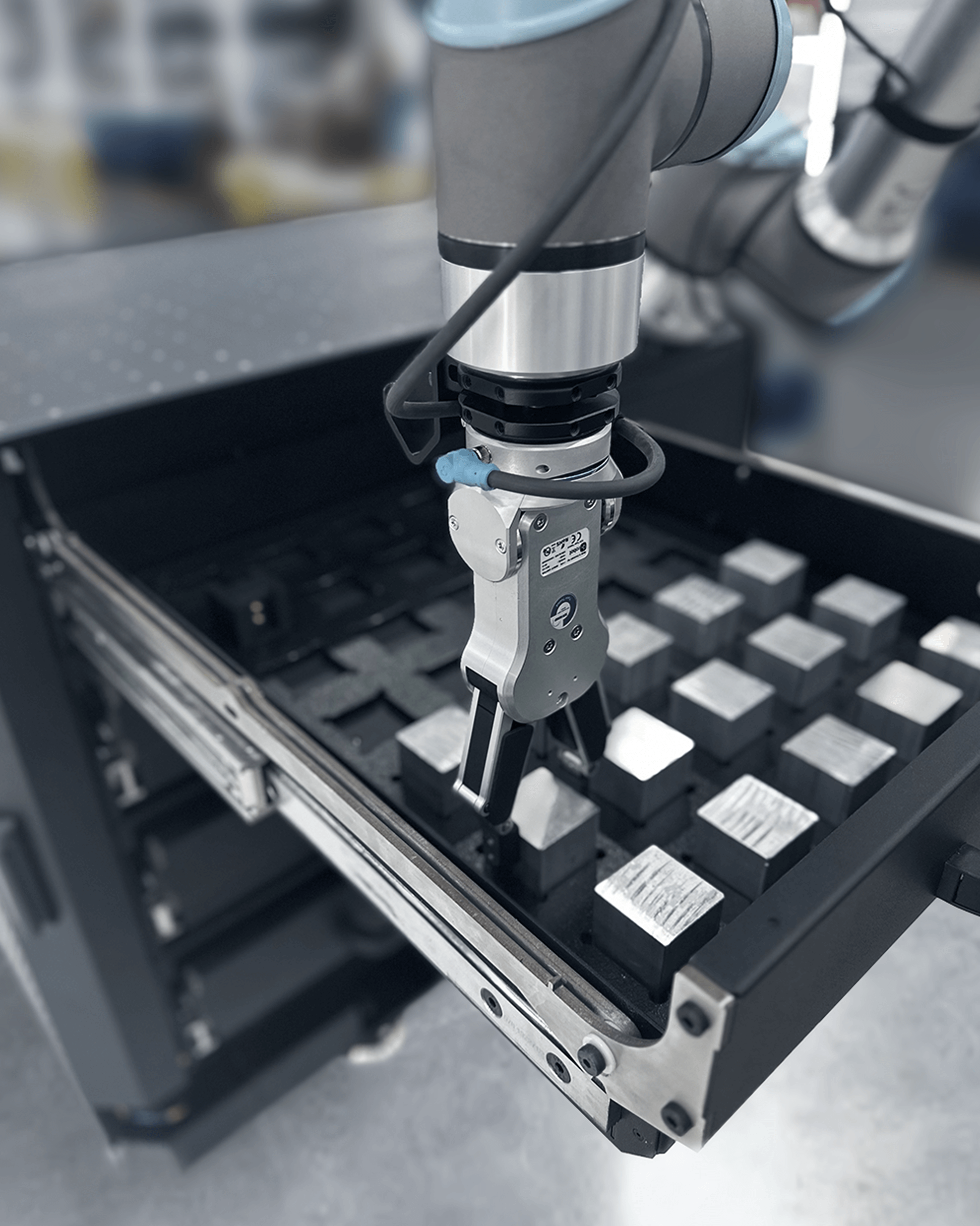
CNC automation with robotic loading and unloading; highly configurable to meet your autonomy requirements.
Tray and drawer configurations providing hours of autonomy
Compatible with ABB, FANUC and Universal Robots
Customizable EOAT, safety system, tool changer, and more
Design, program, deploy and operate custom applications at lightning speed, powered by the Vention platform.
Jumpstart your application with one of 1,000+ templates
Program in Python, code-free or MachineApps templates
Benefit from built-in analytics and remote camera feed
Average Payback
Faster Deployment
Average Customer ROI
Net Promoter Score
From SMB to Enterprise, discover client success stories from turnkey application deployment, to self-service automation projects.
Introducing two robot palletizers helped Rev-A-Shelf increase efficiency, lower costs, and palletize thousands of SKUs.
5,700+ SKUs palletized
Eight operators reallocated
$150,000 annual savings

A custom conveyor system was fully operational in under 6 weeks and increased fulfillment to 5,000+ orders/day.
Fully designed, programmed and deployed with Vention support
Re-allocation of 15 workers to high-value tasks
Processing 600 orders per hour

A cobot-driven system is helping McAlpine exceed their throughput targets, reallocate labor, and build a future-proof factory floor.
100% automated case packing
24/5 streamlined operation with no human intervention
Enhanced production quality and efficiency

A 3-axis self-programmed robot gantry system minimized errors for hundreds of SKUs and improved employee fulfillment at Safari Sun.
Self-programmed with minimal robot programming experience
8 weeks from idea to machine deployment
Picking automated for 300+ SKUs
"At CERLAB, we focus a lot on solving industrial problems. And having a partner like Vention who provides us with the tools required to do that is a great one for us."

"Vention empowers our team to actually be part of the solution, help on the design, and then be the team to learn and implement it."


"The value of having a single ecosystem is we can collaborate on a project and it arrives at our door ready to go. That is awesome."


"The delivery timeline was spectacular. There's no one in the industry that was anywhere close … I think Vention was at least 6 to 8 times faster than anyone else."

Experience how the future of manufacturing automation is being redefined. Watch the on-demand session and see how the world’s only AI-driven full-stack automation platform enables faster, smarter, and more confident automation deployment.






Explore Vention's latest insights and industry perspectives on our blog. Deepen your automation expertise with online guides and professional training. Visit us at one of our Experience Centers or upcoming events in your region.
Blog
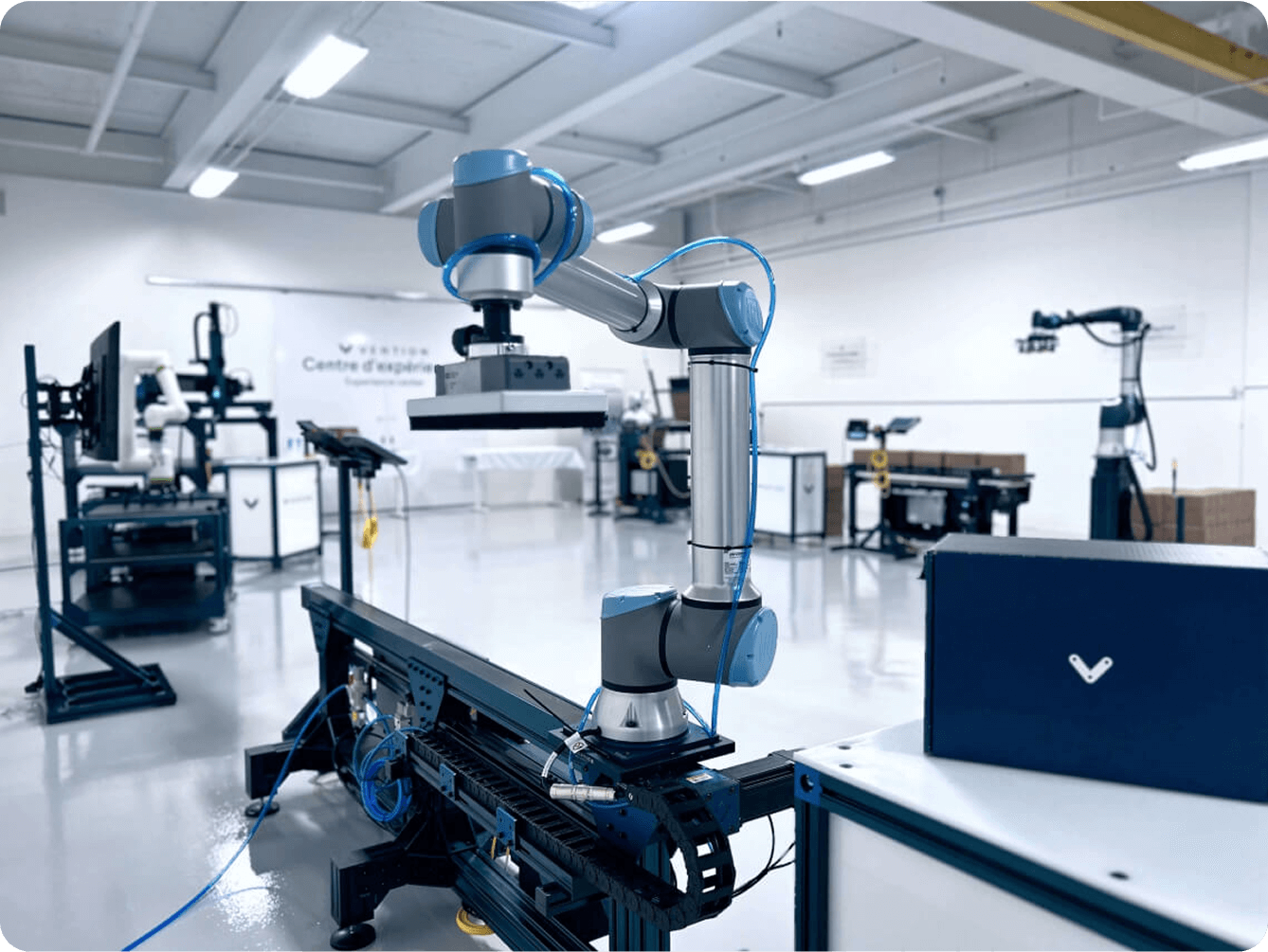
Vention Experience Centre
Professional training

Events
Join our growing community of automation practitioners and robotics experts.
ISO 27001 & NIST